Interrupções e EXTI com STM32F103C8T6
O que são interrupções?
Em sistemas eletrônicos digitais, o processamento normalmente ocorre de forma sequencial, onde o sistema executa continuamente um fluxo principal de instruções dentro de um loop.
Interrupções são mecanismos de hardware que permitem que eventos externos ou internos interrompam temporariamente essa execução para que uma rotina de atendimento seja executada imediatamente.
No STM32, as interrupções externas são implementadas através do periférico EXTI (External Interrupt/Event Controller), que permite detectar mudanças de nível lógico em pinos GPIO sem a necessidade de verificação contínua por software (polling).
Esse mecanismo é essencial em sistemas embarcados, pois reduz o consumo de CPU e garante resposta rápida a eventos assíncronos, como acionamento de botões, sensores digitais e sinais externos.
Neste artigo, será utilizado um botão conectado ao pino PA0 para gerar uma interrupção externa (EXTI), enquanto o LED onboard no pino PC13 será utilizado para demonstrar, na prática, o tratamento de eventos baseado em interrupções no STM32F103C8T6.
- STM32F103C8T6 (Blue Pill)
- LED verde no PC13
- Botão no PA0
Esquema de ligação
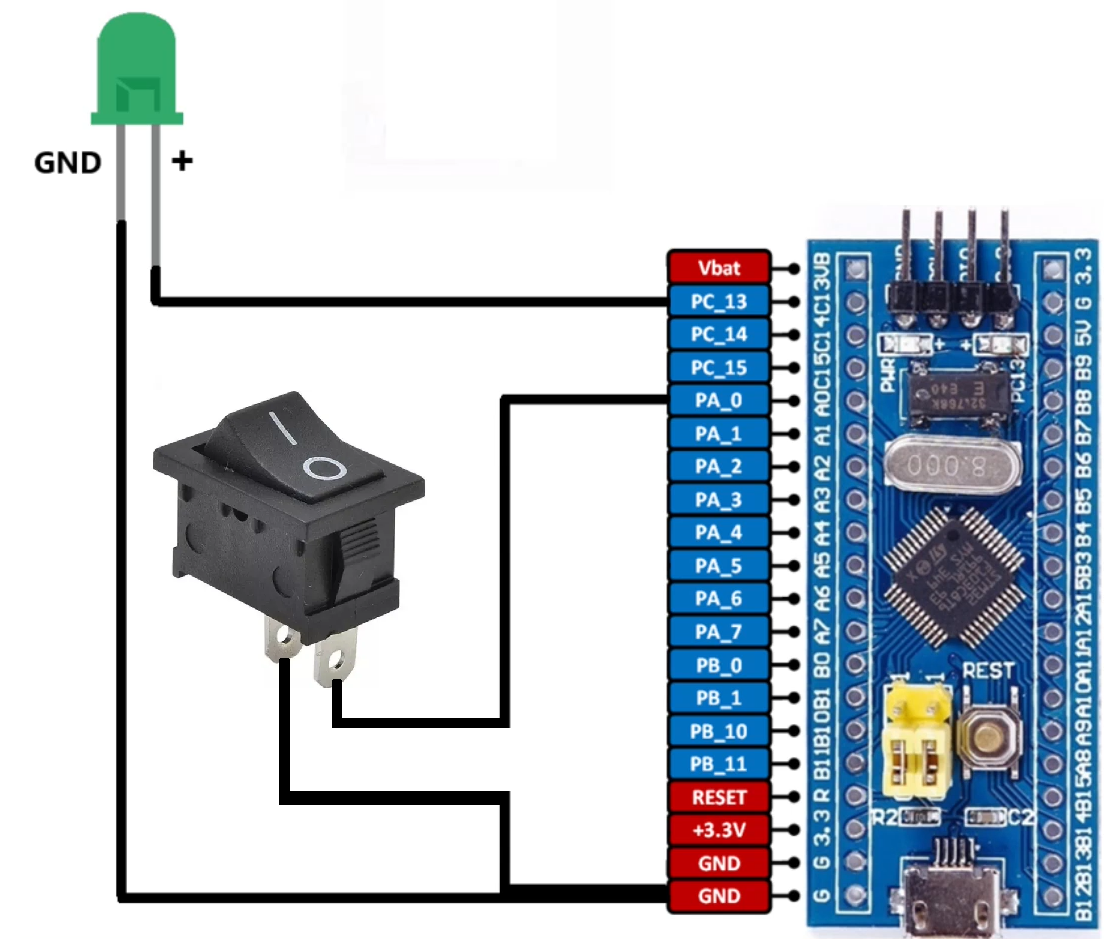
O botão foi conectado ao pino PA0 e o LED onboard da Blue Pill utiliza o pino PC13.
Funcionamento da interrupção EXTI
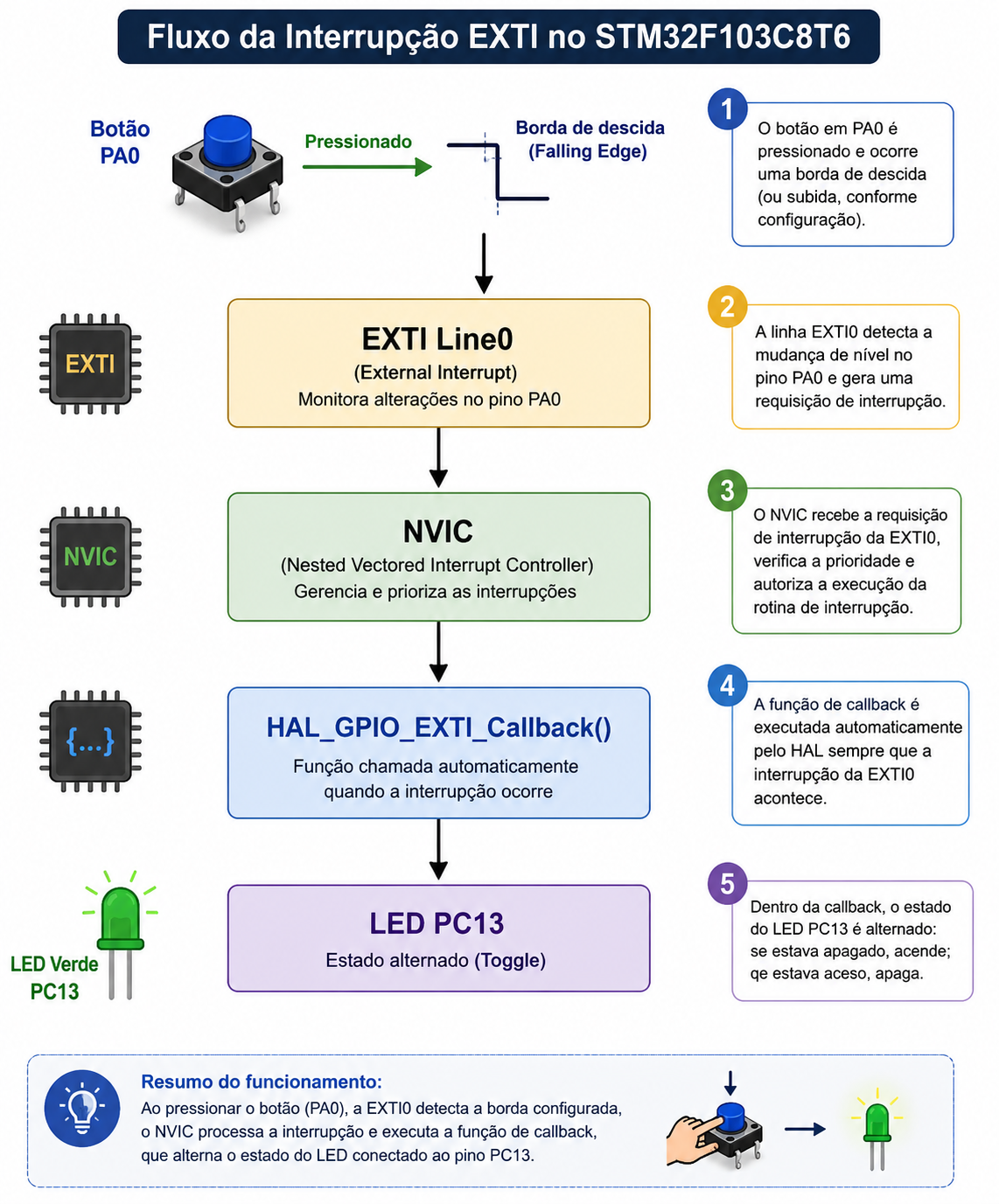
Quando o botão conectado ao PA0 é pressionado, o periférico EXTI detecta a mudança de nível lógico e gera uma interrupção.
O NVIC então executa automaticamente a função HAL_GPIO_EXTI_Callback(), onde vamos alternar o estado do LED no PC13.
Configuração no STM32CubeIDE
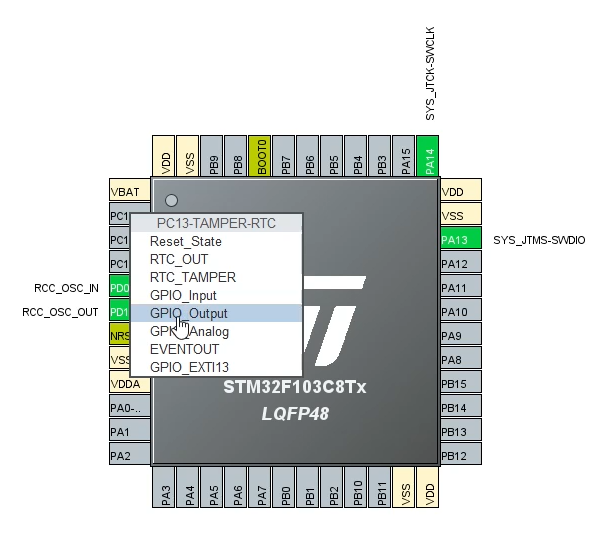
Passo 1 — Configurar o PC13 como saída
Configure o pino PC13 como GPIO_Output.
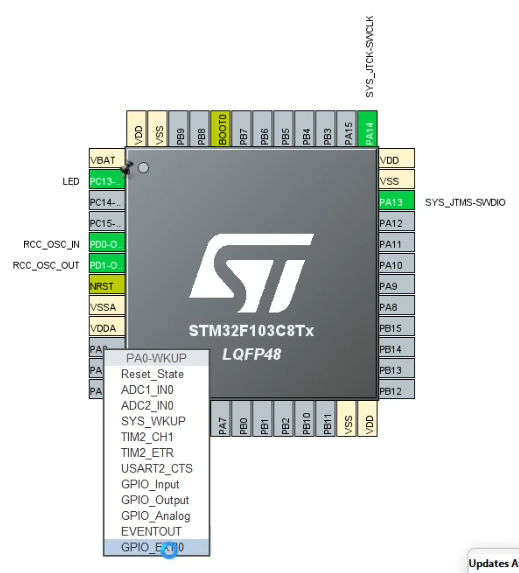
Passo 2 — Configurar o PA0 como EXTI
Configure o pino PA0 como GPIO_EXTI0.
Passo 3 — Configurar Pull-up
Configure o PA0 com resistor interno Pull-up.
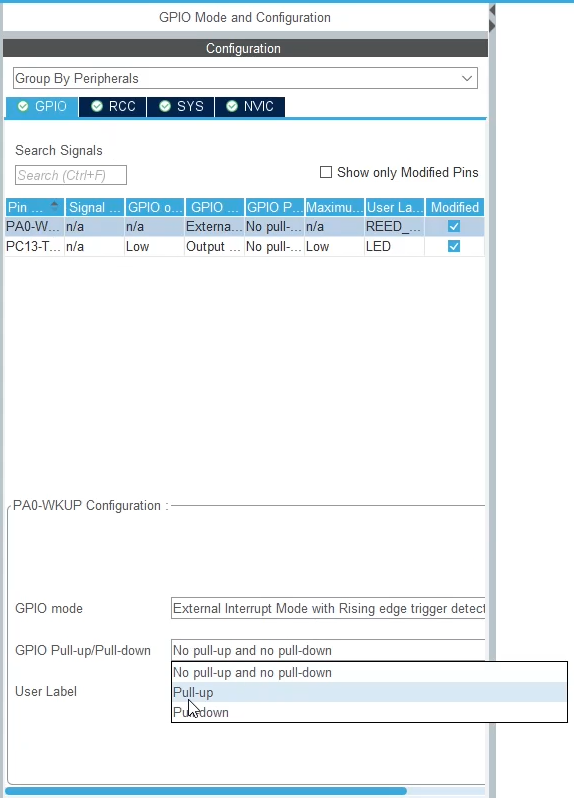
Dessa forma o pino ficará normalmente em nível alto, indo para nível baixo quando o botão for pressionado.
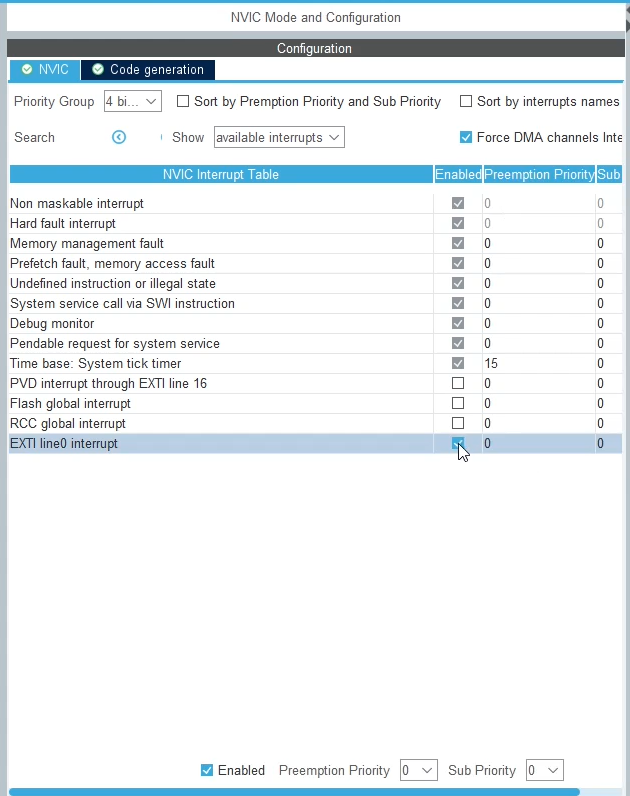
Passo 4 — Habilitar interrupção no NVIC
Vá em:
- System Core
- NVIC
- Habilite EXTI line0 interrupt
Código em C utilizando HAL
O código abaixo alterna o LED do PC13 sempre que o botão conectado ao PA0 for pressionado.
#include "main.h"
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
while (1)
{
}
}
/*
* Callback da interrupção EXTI
*/
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_0)
{
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
}
}
Como funciona o código
HAL_GPIO_EXTI_Callback() é chamada automaticamente pela HAL quando ocorre uma interrupção externa.
A variável GPIO_Pin identifica qual pino gerou a interrupção.
No nosso exemplo verificamos:
if(GPIO_Pin == GPIO_PIN_0)
Isso garante que a interrupção veio do PA0.
Em seguida:
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
alterna o estado do LED conectado ao PC13.
Como estamos utilizando interrupções, o while principal pode permanecer vazio.
Vantagens de utilizar interrupções
- Resposta imediata ao botão
- Menor uso de CPU
- Maior eficiência do microcontrolador
- Código mais profissional
- Menos processamento dentro do while
Observação importante sobre o PC13
Na Blue Pill o LED onboard do PC13 normalmente trabalha invertido.
- LOW → LED ligado
- HIGH → LED desligado
Mesmo assim, a função Toggle continua funcionando corretamente.
Conclusão
As interrupções externas (EXTI) são um recurso fundamental em sistemas embarcados, pois permitem que o microcontrolador reaja imediatamente a eventos externos sem depender de verificação contínua por software.
Neste artigo, foi apresentado o funcionamento do periférico EXTI no STM32F103C8T6, incluindo a configuração de um pino GPIO como fonte de interrupção e o uso de callbacks da HAL para tratamento do evento.
Foi demonstrado também como o NVIC gerencia a execução das interrupções e como o STM32 prioriza automaticamente eventos críticos do sistema.
Esse conceito é amplamente utilizado em aplicações reais como leitura de botões, sensores digitais, encoders e sistemas baseados em eventos, sendo essencial para projetos eficientes e responsivos.
Com esse conhecimento, o próximo passo é avançar para o uso de interrupções mais complexas, como timers e comunicação serial, onde múltiplos eventos podem ocorrer simultaneamente.
Próximo passo: evoluir no STM32
O curso STM32 para Iniciantes foi desenvolvido para ajudar estudantes e profissionais a iniciarem no desenvolvimento de sistemas embarcados.
Você vai aprender GPIO, ADC, PWM, UART, SPI, I2C, CAN, timers e muito mais.
👉 Acesse agora: